AI turns robotic bin picking into low-hanging fruit
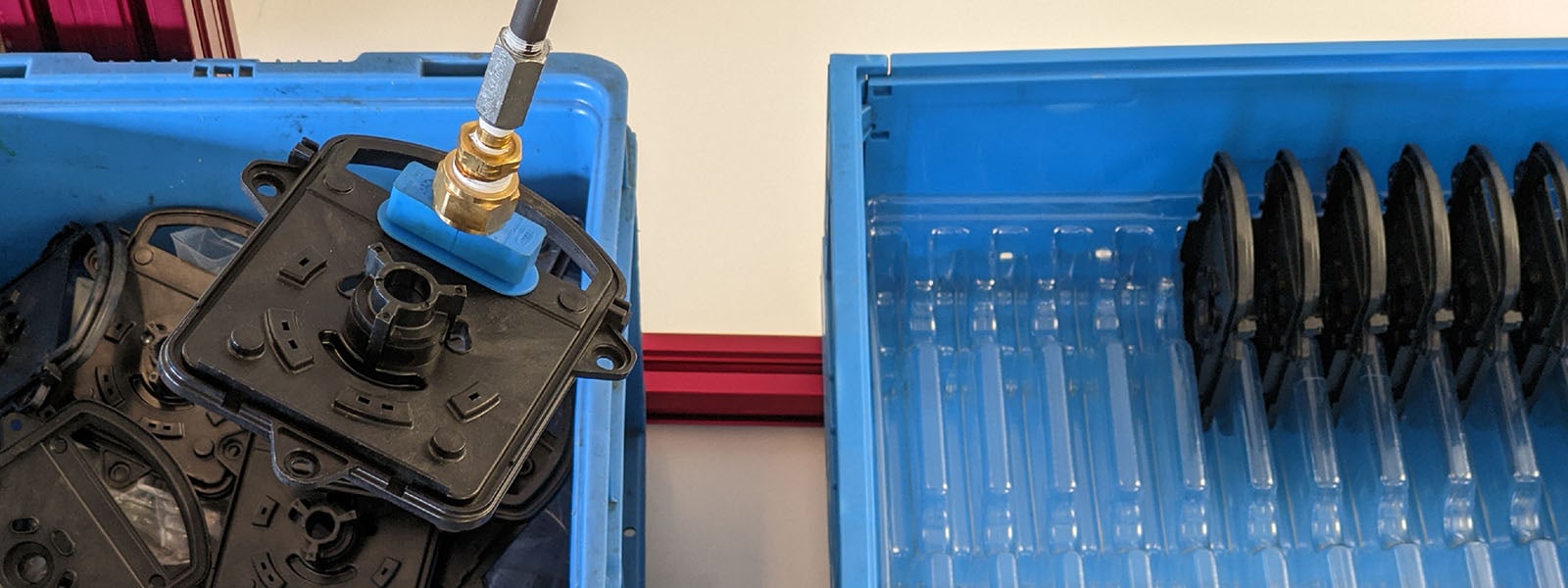
Ever watch a bin picking video on YouTube? You see the flash of a structured light across the randomized objects in the bin. Then the slooooowwww robotic movements as the object is picked and placed. If only you could leap through the screen to do the job faster!
Let’s look at bin picking with a competing 3D camera vision system.
That’s why it’s not surprising when manufacturers tell us that their bin picking stations are not automated. Would you go ahead with automation based on uncertain performance?
There is a lot of ‘ifs, ands and buts’ with these workcells. Structured light systems need carefully controlled ambient light conditions in order to work. Even then, they struggle with changes in light conditions, or when the objects are shiny, reflective, or transparent. Workcells must be taken offline to train new objects with 3D vision systems.
Customized programming enables it all to work, which is time-consuming to write and hard to change or repurpose. The requirement for vision expertise to deploy and operate robots is an obstacle to using automation for more bin picking applications.
AI unlocks new capabilities in bin picking
Here’s what’s new: Software driven by artificial intelligence (AI) enables picking workcells that use simpler hardware. Using only paired 2D cameras to feed AI-driven software, your bin picking operations will be faster and smarter. You no longer need complex 3D vision cameras, structured light and ultra-precise fixturing to make things work.
Let’s look at bin picking with Apera AI’s Vue robotic vision software.
For a bin picking workcell to do its job, the robotic guidance software has to tick all of the boxes in the checklist.
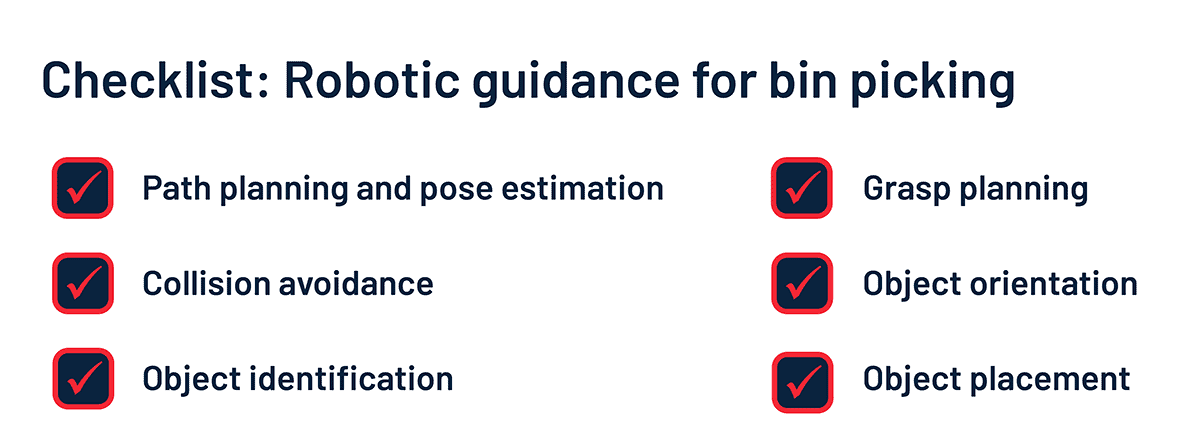
Functionally, this checklist means the robot will be able to guide itself in and out of a pick without a collision. It will be able to identify the most pickable object, grasp it and orient it such that that it can be placed. The robot will be able to carry out these responsibilities until every item is picked from the bin. Ideally, this would happen with a minimal amount of operator attention.
A key difference with AI-driven bin picking software is that lighting is not tightly controlled—operations happen under ambient light conditions, even if they change in the course of operations. Also, the finish of the objects is understood by the software. It makes no difference to AI-driven software if the objects are shiny, clear, reflective or translucent. These former exceptions can now be reliably picked.
Creating an AI software-driven bin picking workcell
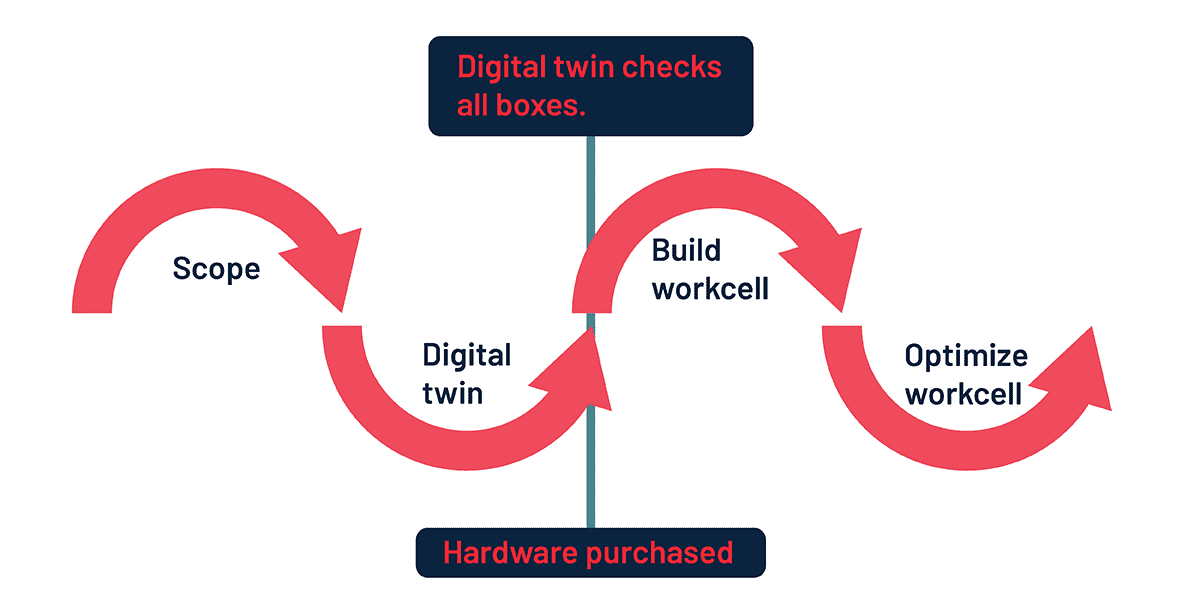
All of the items on the robotic bin picking checklist can be confirmed using a digital twin simulation of the workcell. This simulation accounts for the robot, gripper, objects (including shape, finish and other features) and the bins and placement surfaces.
The critical point here is that the cost and performance of the workcell are de-risked before any hardware is purchased. And the hardware requirements are much simpler—with no specialized cameras, sensors or fixturing required.
The objects are taught into a neural network, where thousands of images with synthetic data are analyzed to show the objects in many different orientations.
Scoping your next bin picking project?
Get in touch with Apera AI to see how we can help make your bin picking workcells more productive. We can jump on a quick call to answer your immediate questions.